HAL, CubeMX, TrueSTUDIO를 이용한 STM32F4 무료 강좌
ChrisP
고성능 마이크로컨트롤러인 STM32F 시리즈를 처음 접하는 분들이 쉽게 시작할 수 있도록 무료 컴파일러 TrueSTUDIO 및 코드자동생성 프로그램 CubeMX 설치부터 칩 기능의 개념설명, 소스코드작성(HAL 드라이버 함수 설명), 하드웨어 구현까지 모든 과정을 다룹니다.
초급
C, IoT, 드론 개발
※ 본 강의는 22년9월부터 전면 무료화 되었습니다. 무료 컴파일러인 STM32CubeIDE를 이용한 STM32F4 고성능 자작 드론의 FCC 비행제어 시스템을 처음부터 끝까지 모두 직접 개발하는 유일한 강좌입니다. ArduPilot이나 Pixhawk등 드론 오픈소스를 사용하지 않고 센서 인터페이스부터 PID 제어까지 모두 직접 구현하기 때문에 드론 제어시스템 및 임베디드 시스템의 모든 개발 과정들을 경험하고 학습할 수 있습니다. 비전공자, 초보자도 쉽게 따라할 수 있도록 수업에서 모든 소스코드와 하드웨어 조립 방법에 대해 천천히 설명드립니다. 천천히 따라만 하시면 내가 직접 개발한 자신만의 드론으로 상용제품보다 안정적인 비행을 경험하실 수 있습니다.
STM32F4 기반 고성능 드론 비행제어시스템 개발
STM32CubeIDE 사용법
CubeMx 사용법
STM32F4 HAL 및 LL 드라이버 사용법(주로 LL 사용)
임베디드 시스템 개발 프로세스
자작드론 FC 개발
9축(BNO080) 및 6축(ICM-20602) 센서, 기압센서(LPS22HH) 인터페이스
UBLOX NEO M8N 인터페이스 및 데이터 파싱 (u-center 사용)
FlySky FS-iA6B 수신기 인터페이스(iBus) 및 데이터 파싱, FS-i6 송신기 설정
쿼드로터 드론 기체 셋팅하는 방법
TIM을 이용한 PWM 생성방법
ESC 캘리브레이션 및 ESC 프로토콜 종류(Standard PWM, Oneshot, Multishot, Dshot 등)
3DR Telemetry 설정 (3DR radio config 사용)
드론 상태 정보 송수신 (센서 데이터, FS-i6 조종기 데이터, 배터리 전압, PID 제어 게인 등)
부가 기능 - EEPROM에 PID게인 저장, 배터리 전압 체크(ADC) 및 저전압 알람
안전을 위한 기능 - 부팅 시 센서 상태 검사, Fail-safe 등
드론의 자세 제어 기법 - PID 제어
싱글 PID 제어 이론과 실험
더블 PID 제어 이론과 실험
안녕하세요 M-HIVE ChrisP 입니다.
본 강좌는 STM32F4 Micro Controller를 이용한 자작드론 개발하기 강좌로서, 드론의 비행제어시스템(Flight Control System) 개발을 위한 센서 인터페이스부터 PID 제어까지 전 과정을 다룹니다.
다른 드론 개발 강좌와 다르게 STM32F4를 이용하여 센서 인터페이스부터 시작해서 PID 제어까지 모든 소스코드를 직접 하나씩 다 작성하는 강의입니다. 오픈소스를 사용하지 않고 모든 기능들을 직접 하나씩 구현하기 때문에 드론을 개발하는 과정과 임베디드 펌웨어 개발 과정을 쉽게 이해하실 수 있습니다.
게다가 본 강의에서 개발한 드론은 pixhawk, ardupilot같은 상용품에 비해 성능이 전혀 뒤떨어지지 않기 때문에 단순 교육용 드론을 넘어 연구용, 산업용으로도 응용 가능합니다. 또한 본 강좌에서 사용하는 MH-FC V2.2는 드론 뿐 아니라 움직이는 모든 무인이동체에 적용 가능하니 무인 자동차같은 시스템에도 응용될 수 있겠죠!
 |
.jpg) |
| 강의에서 사용하는 드론 부품들 | 완성된 드론의 모습 |
 |
 |
| PID 제어 이론 및 코드 구현 | 센서데이터 수신 및 데이터 시각화 |
 |
 |
| 1축 PID제어 테스트 | 최종 비행 |
강의는 총 3개의 파트, 12개의 챕터로 구성되어 있습니다.
파트1 에서는 FC(Flight Controller)의 기초
파트2 에서는 통신 및 부가기능
파트3 에서는 비행 제어(PID Control)
의 순서로 진행됩니다.
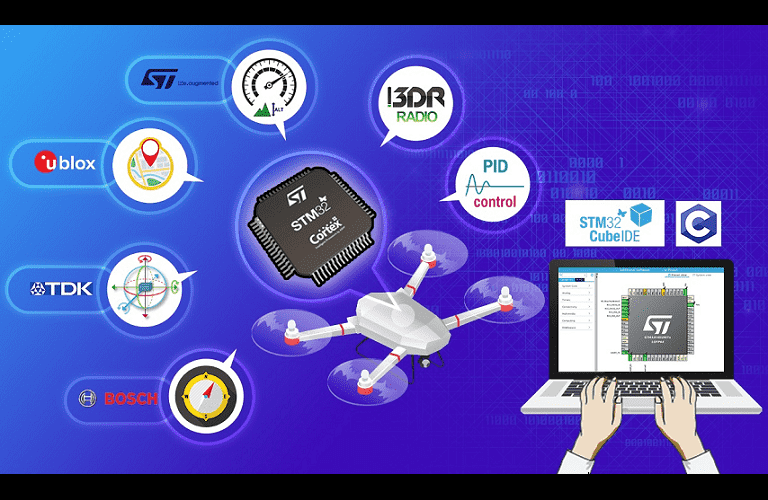
본 강의에서는 STM32F405RGT Cortex M4 마이크로 컨트롤러를 메인 프로세서로 사용하고, 자세제어를 위한 BNO080 9축 센서, ICM-20602 6축 센서와 고도제어를 위한 LPS22HH 기압센서를 사용합니다. 또한 실외 자동 비행을 위한 UBLOX M8N GPS 데이터 수신까지 다룹니다. (단, 고도제어와 GPS 제어는 본 강의에서는 다루지 않음)
본 강좌의 목적은 고성능 드론을 개발하는 것이지만, 그 개발하는 과정에 대해 더 심도있게 다룹니다.
드론 비행을 위한 가장 기초단계인 센서 데이터 인터페이스 부터 자세제어를 위한 PID Control 까지 다룹니다.
임베디드 어플리케이션을 개발하기 위한 과정들을 집중적으로 설명드리고, 그것들이 합쳐져 드론비행제어 시스템이 완성됩니다.
유익한 동영상 강의 되도록 항상 노력하겠습니다.
- M-HIVE ChrisP
학습 대상은
누구일까요?
고성능 드론의 기초부터 비행제어까지 하나씩 직접 개발하고 싶으신 분
STM32를 이용하여 심도있는 응용프로그램을 개발해보고 싶으신 분
전자, 통신, 제어, 기계, 항공 등 전공 학생
드론 관련 종사자
임베디드 시스템 개발 프로세스를 경험해보고 싶으신 분
아두이노나 8bit MCU에서 32bit MCU로 넘어가려고 하시는 분
PID제어의 기초개념 학습과 동작을 직접 구현하려고 하시는 분
고수준 임베디드 프로젝트를 실습해보고 싶으신 분
드론 관련 연구기관 및 교육기관
무인이동체에 관련된 프로젝트를 진행하는 분
선수 지식,
필요할까요?
본 강좌에서 사용하는 MH-FC V2.2 Flight Controller 필수!! (없으면 진행 불가능!! M-HIVE 스마트스토어에서 구매 가능)
드론 구성품 (BLDC 모터, ESC, 프로펠러, 프레임, 배터리 등. M-HIVE 네이버 카페에서 목록 확인 필수)
Windows 계열 PC 및 STM32CubeIDE
C언어 중급 이상 요구됨
기초 회로 지식 요구됨
STM32F4 또는 마이크로 컨트롤러 (MCU) 개발 경험 필수
전체
53개 ∙ (31시간 21분)
전체
80개
5.0
80개의 수강평
수강평 3
∙
평균 평점 5.0
5
평소 임베디드 제품 개발에 관심을 가지고 있었습니다. 몇 권의 C언어책과 유튜브 예제 따라하기로는 한계가 있던차에 인프런 드론 개발 강좌를 듣게 되었습니다. LED 켜기 부터 PID 제어까지 하나 하나씩 따라하면서 임베디드 제품 개발 노하우를 배울 수 있었습니다. 각종 센서 데이터를 수신, 처리하고 무선 송수신 장치와 통신하면서 제한된 시간안에 드론 자세를 조정하는 코딩 방법을 알게되었습니다. 꼼꼼한 설명을 따라서 코딩했더니 드론 비행도 무난히 성공했습니다. 통신 프로토콜 구조체 정의, 형변환, 타이머 사용법, while 루프 에서 함수 호출 요령 등 임베디드 개발에 필요한 코딩 노하우를 익히실 수 있습니다. C는 좀 알고 있는데 매번 LED 켜고 끄는 예제에서 실력이 제자리이신 분들에게 이 강좌를 강력히 추천드립니다. 강의 만드시느라 고생 많으셨습니다. 감사합니다~
안녕하세요 별점 5점 정말 감사드립니다! 본 강의에서 다룬 외부장치와 통신하는 내용, 센서인터페이스하는 방법, 특정 주기대로 원하는 동작을 수행하도록 하는 방법 등은 아주 중요하고 자주 사용되는 기능들인데 다른 강의에서 잘 다루지 않는 것 같습니다. 어떤 제품을 개발하든, 위의 내용들은 반드시 알고 있어야 하고, 따라서 본 강의에서는 그런 내용들을 좀 더 깊이 다루려고 했는데 잘 전달이 되었길 바랍니다. 그럼 항상 안전한 비행하시기 바라고, 충분히 연습 후 비행을 하시기 바라겠습니다! 감사합니다.
수강평 1
∙
평균 평점 5.0
5
안녕하세요. 현재 강의를 듣고있는 대학생입니다. 어려울수 있는 강의내용을 잘 풀어서 설명해주시고, 어려운 부분이 있으면 질문 게시판 또는 카페를 통해 피드백을 주시는데 이부분이 정말 인터넷강의에서 답답할 수 있는 부분을 해소해주셔서 현장에서 듣는 강의처럼 들을 수 있어 너무 좋습니다. stm32를 처음 접해보았는데 강의를 보며 진도를 따라가고 실습을 하다보니 공부가 많이 된것같습니다. 앞으로도 좋은 강의 부탁드리고, 관심있는 강의가 있으면 또 찾아 보겠습니다!!!!!
별점 5점에 수강평도 정말 감사합니다. 앞으로 진행하시면서도 질문 있으시면 언제든 질문 올려주시면 확인하는대로 답글 달아드리도록 하겠습니다! 그럼 안전하고 즐거운 드론 개발되시기 바랍니다~
지식공유자님의 다른 강의를 만나보세요!
같은 분야의 다른 강의를 만나보세요!